DotBot Logistics¶
Collision-free multi-robot navigation for a DotBot swarm, built on PIBT (Priority Inheritance with Backtracking). Each robot is routed on a discrete grid; PIBT guarantees that no two robots ever claim the same cell, which makes it a natural fit for intralogistics — many small autonomous units moving stock around a shared warehouse floor without colliding.
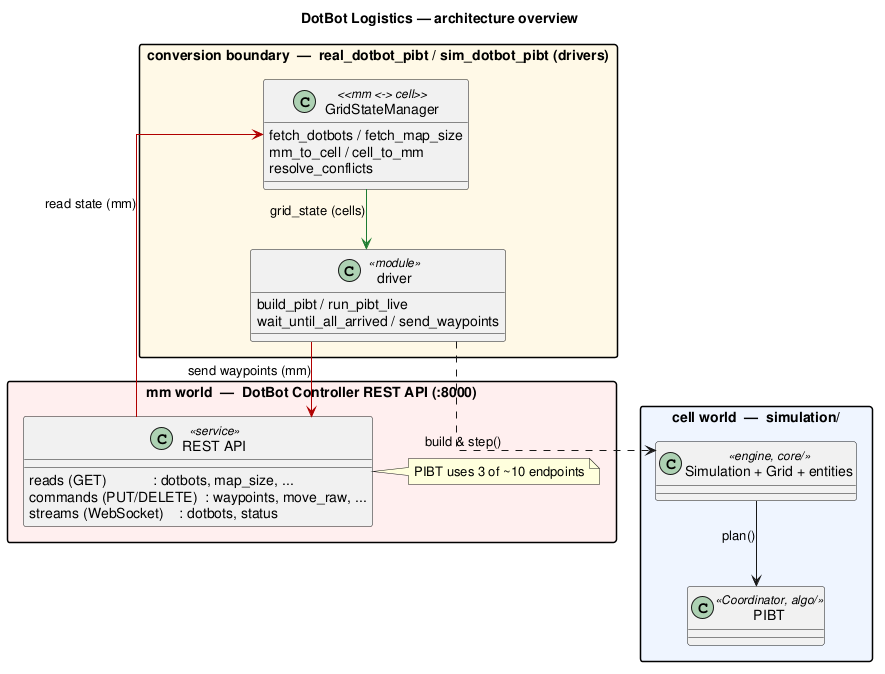
Architecture overview — the boundary between the mm world (the DotBot controller's
REST API, everything in millimetres) and the cell world (simulation/, everything in
integer grid cells), bridged by GridStateManager. See
Contributing → Architecture for the detailed diagrams.
What this documentation is for¶
This site is a reproduction guide. It picks up exactly where the PyDotBot installation guide leaves off and walks you, step by step, through everything that was built here — so you can run it yourself.
The work is organised as three abstraction levels of increasing realism. Each level adds one layer between the abstract plan and the physical world, so that if something breaks you know which layer to blame.
Where do you want to start?
- Level 0 — Run a PIBT to see how it works. The pure planner on an abstract grid: an interactive viewer and a headless benchmark. No robot, no controller — just the algorithm.
- Level 1 — Plug it to fake bots. Drive simulated DotBots through the full PyDotBot controller and web UI. Same REST API as the real swarm, so the code you run here runs unchanged on hardware.
- Level 2 — Vrrrm! Now it's real test time. The same plan on real DotBots: MQTT broker, Mari gateway, LH2 localisation, and the batch test harness used for the experiments.
Start with Installation, then follow the levels in order.
The three levels at a glance¶
| Level | Reality | Entry point | What it answers |
|---|---|---|---|
| 0 | Abstract grid, no robot | sim_pibt.py, sim_many_pibt.py |
Is the planner correct, and where does it break? |
| 1 | Simulated bots + controller | dotbot run simulator + sim_dotbot_pibt.py |
Does the plan drive bots through the real API? |
| 2 | Real DotBots | dotbot run controller + real_dotbot_pibt.py |
Does it survive real physics? |