Architecture¶
DotBot Logistics straddles two worlds that speak different languages:
- the mm world — the DotBot controller's REST API, where everything is millimetres;
- the cell world — the
simulation/engine, where everything is integer grid cells.
A thin conversion boundary (the GridStateManager and the top-level driver functions in
real_dotbot_pibt.py / sim_dotbot_pibt.py) translates between them: it reads bot positions
in mm, snaps them to cells for PIBT, then turns the planned cells back into mm waypoints.
Overview¶
The high-level picture — three zones and the data that crosses between them (mm in red, cells in green):
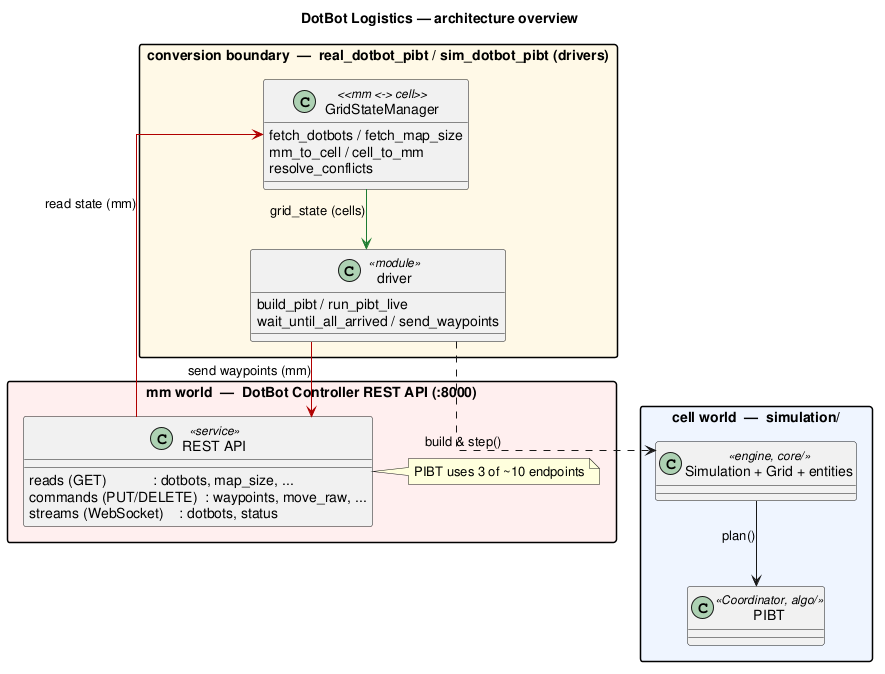
Of the controller's ~10 REST endpoints, the PIBT drivers use only three: two reads
(/controller/dotbots, /controller/map_size) and one command
(PUT …/waypoints). The detail diagrams below zoom into each zone.
Detail A — the mm ↔ cell boundary¶
The full REST API surface grouped into three categories — state reads (GET), commands
(PUT/DELETE), and real-time streams (WebSocket) — with the endpoints the project
actually uses marked [✓ used]. Alongside it, GridStateManager (the mm↔cell converter)
and the driver module's functions.
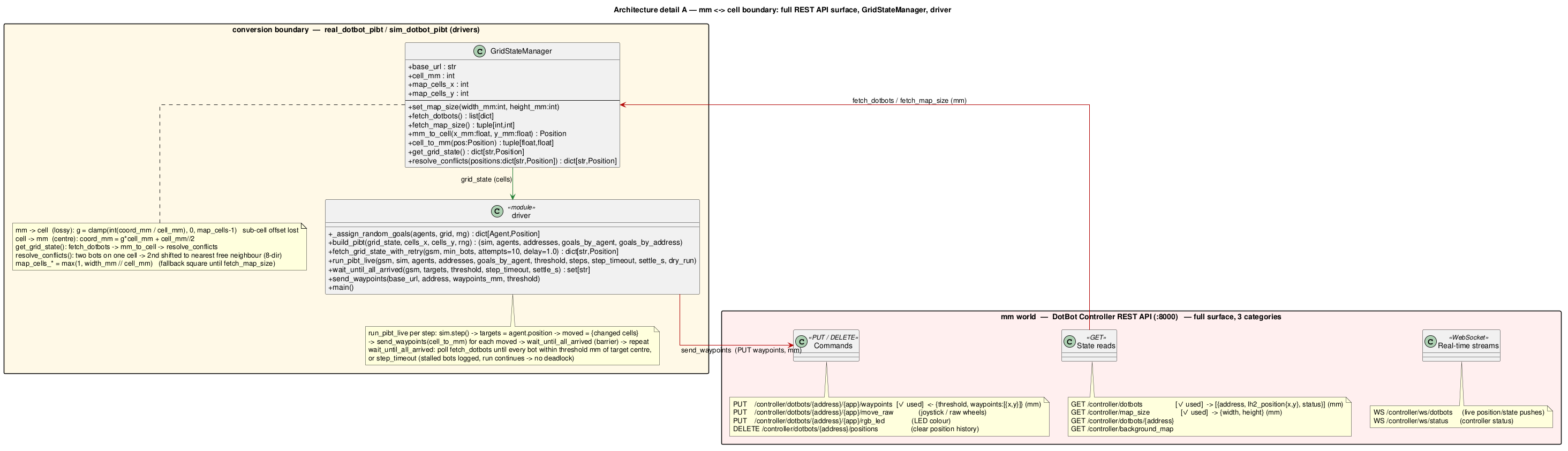
Key points:
- mm → cell is lossy:
g = clamp(int(coord_mm / cell_mm), 0, map_cells-1)— the sub-cell offset is discarded. Two bots that snap to the same cell are separated byresolve_conflicts()(the second moves to the nearest free neighbour). - cell → mm targets the cell centre:
coord_mm = g*cell_mm + cell_mm//2. run_pibt_liveadvances one PIBT step, sends one waypoint per moved bot, then blocks inwait_until_all_arrived(the synchronisation barrier) until every bot is withinthresholdmm of its target — or the per-step timeout fires, in which case stalled bots are logged and the run continues (no deadlock).
Detail B — the simulation core engine¶
The simulation/core package: the entity hierarchy (WorldEntity → Agent / Objective),
the Grid, the pluggable Coordinator interface, and the Simulation that drives a step.
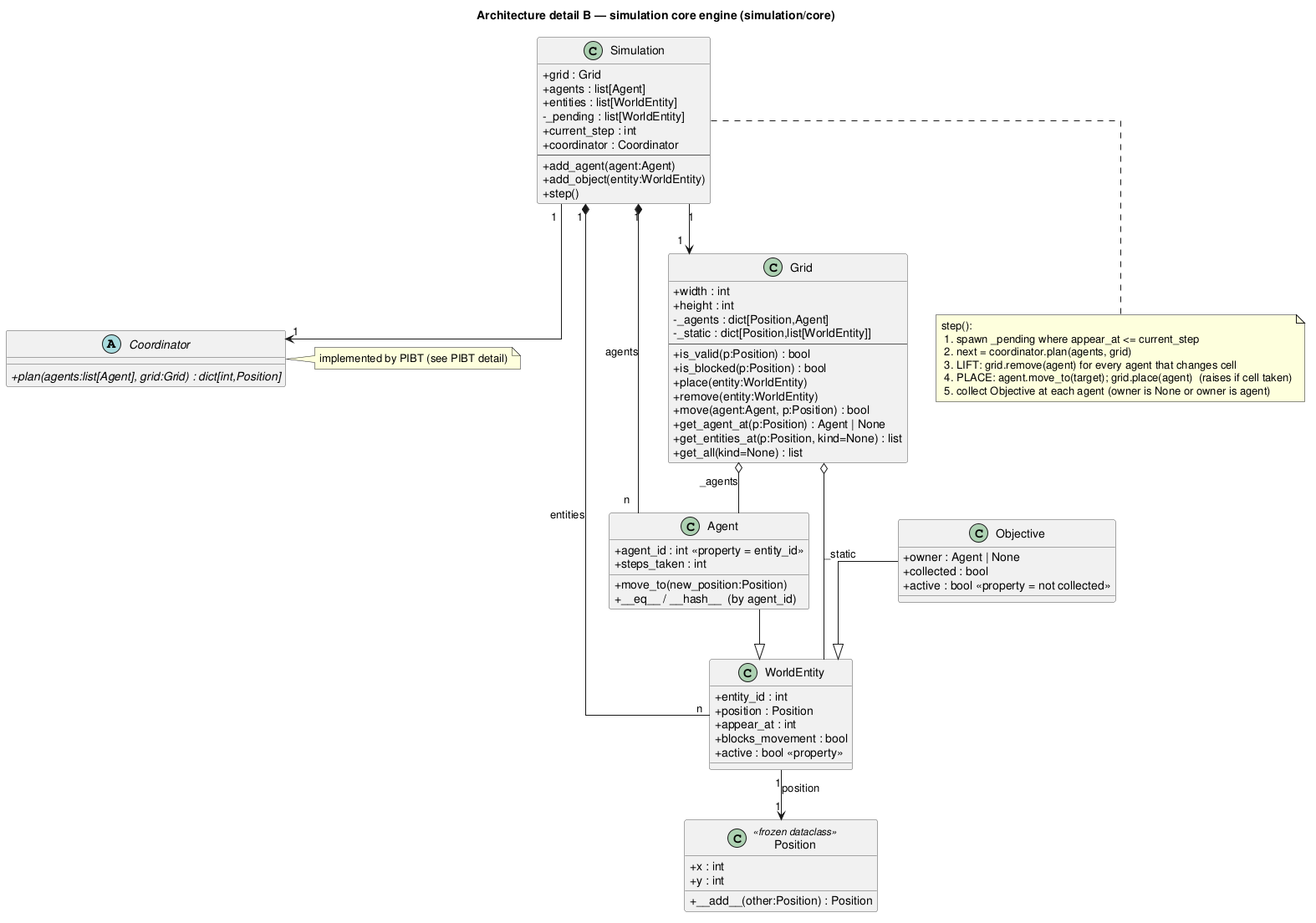
The heart is Simulation.step(), a lift-then-place pipeline: spawn any due entities,
ask the coordinator for everyone's next cell, remove all moving agents from the grid first
(so they don't block each other), place them at their targets, then collect objectives.
Detail C — the PIBT algorithm¶
The PIBT coordinator (simulation/algo/pibt.py), an independent reimplementation of
Okumura et al. (2022)'s Algorithm 1.
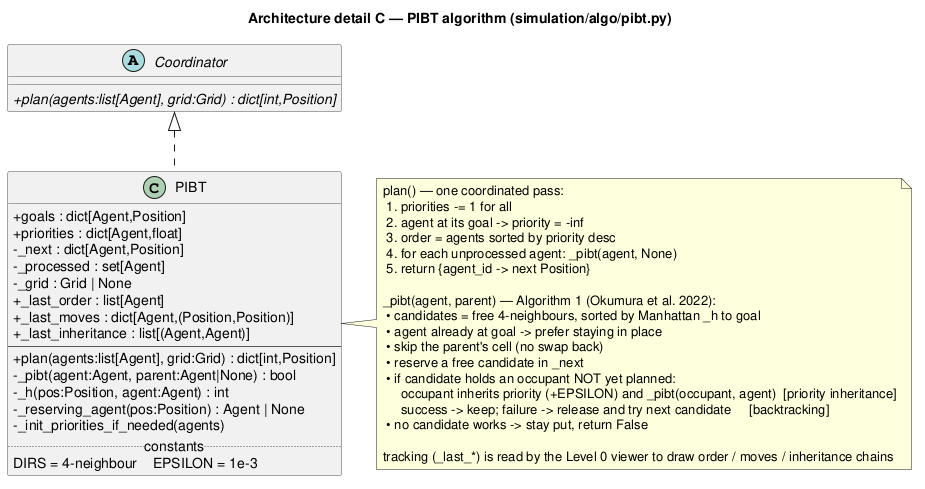
Each plan() ages priorities, pins agents already at their goal to -inf, orders agents by
priority, and runs the recursive _pibt(): an agent reserves its best free neighbour by
Manhattan distance; if that cell holds a not-yet-planned occupant, the occupant inherits
priority and is pushed recursively, backtracking if no move works. The _last_*
tracking attributes are what the Level 0 viewer reads to draw the
priority order, moves, and inheritance chains.
Editing the diagrams
Each diagram is a PlantUML source next to its PNG under docs/assets/
(arch_overview.puml, arch_boundary.puml, arch_core.puml, arch_pibt.puml).
Re-render with plantuml -tpng docs/assets/arch_*.puml.